RAD Lab Robotic Space Simulator (RSS)
A physical simulator for the dynamics of dual spacecraft interactions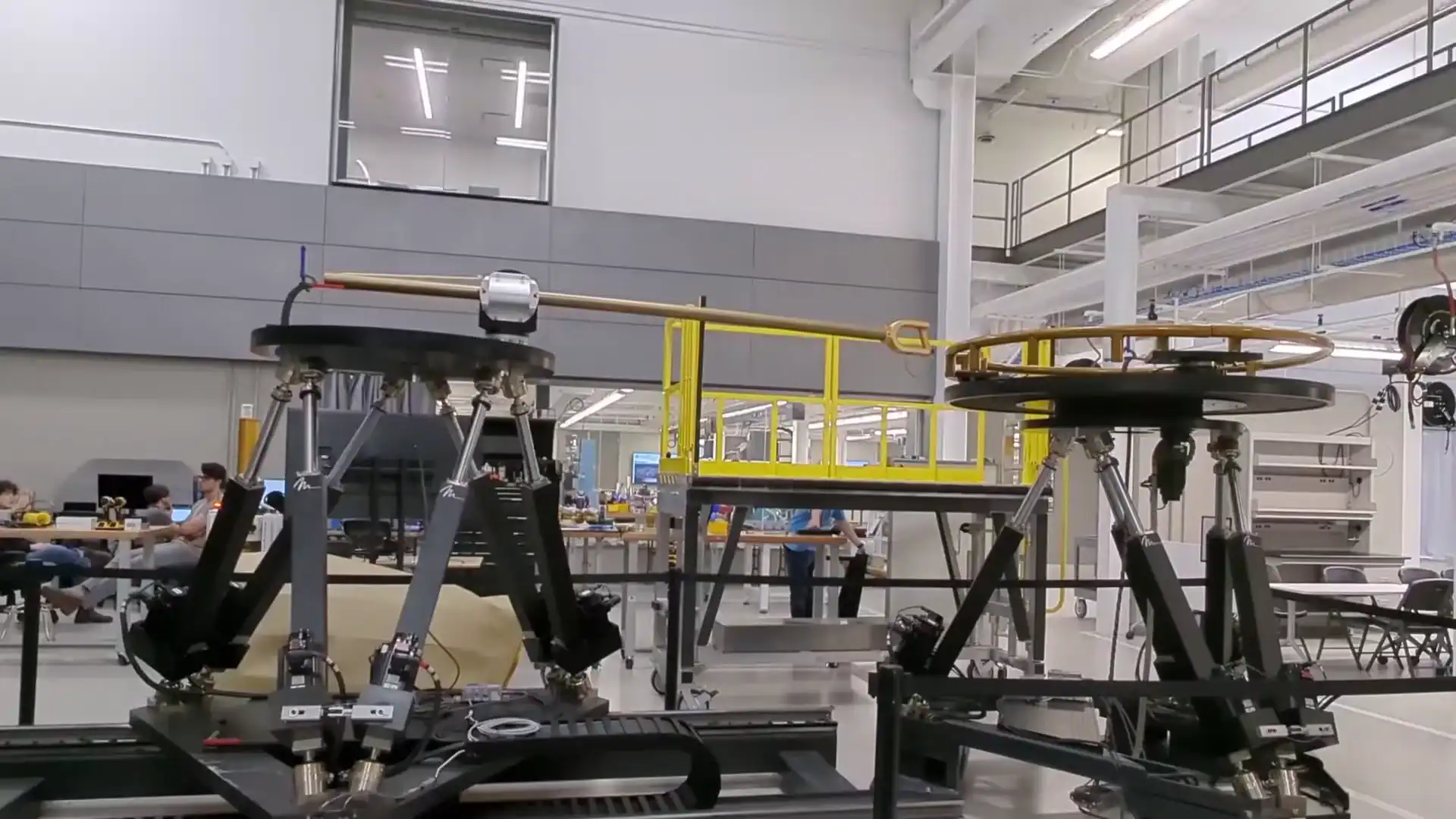

A physical simulator for the dynamics of dual spacecraft interactions
A string-driven robotic gripper designed to mimic a human hand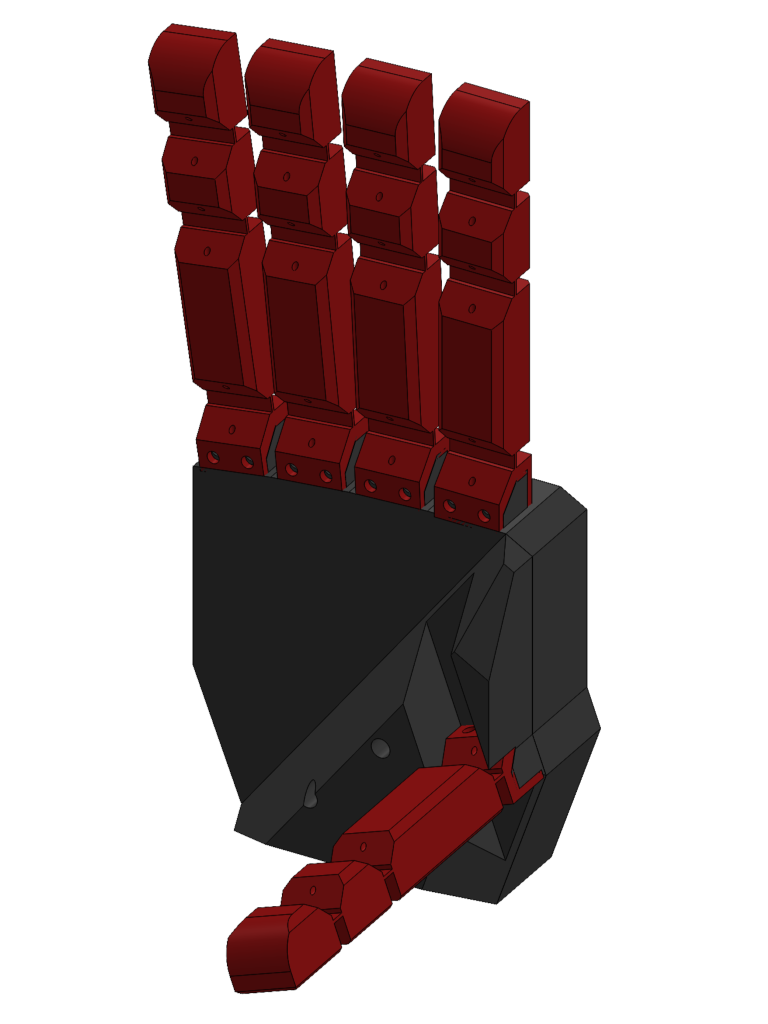
1 DoF soft gripper for manipulating miscellaneous household objects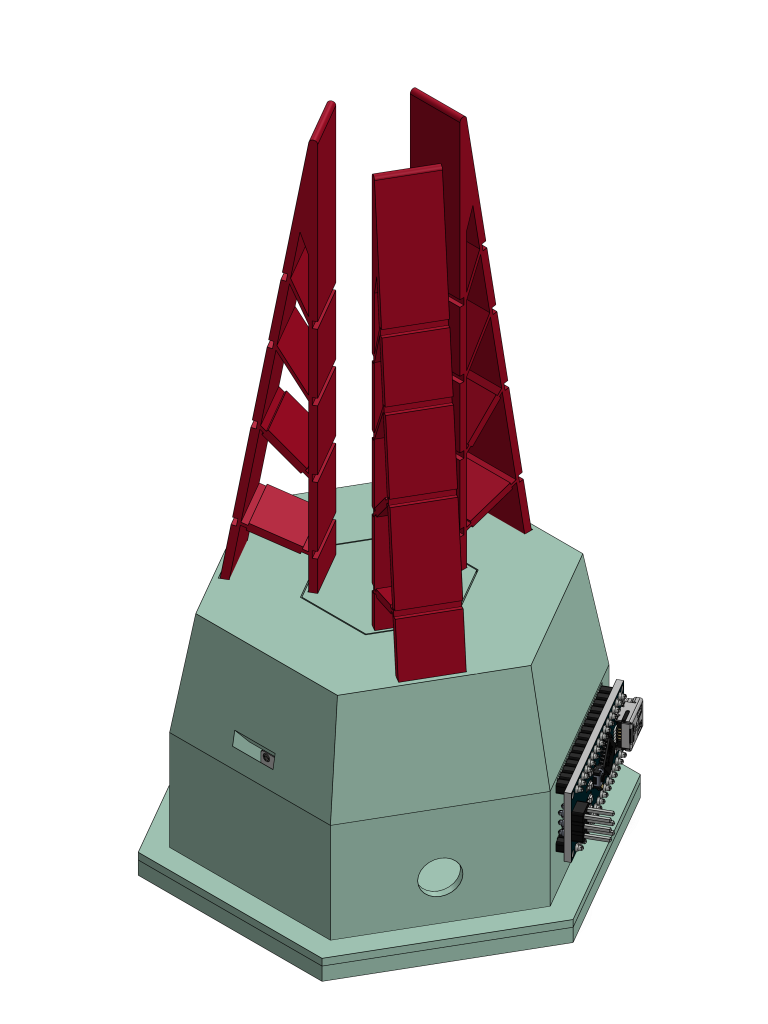
Smart insole for detecting and mitigating Freezing of Gait in Parkinson’s Patients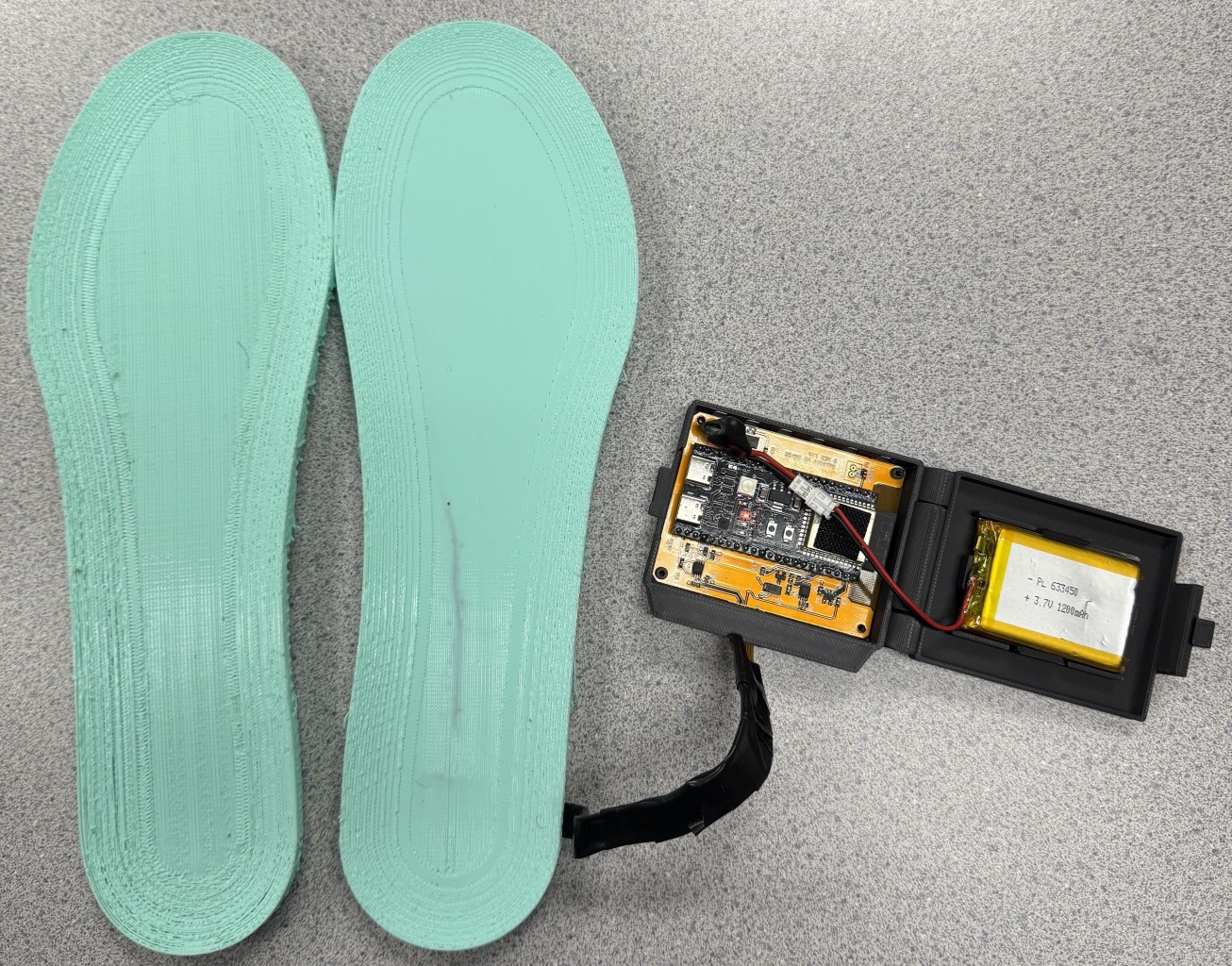
A series of quadrupedal robots developed with TURTLE Robotics at Texas A&M University
Presented at Texas Regional Robotics Symposium, 2024
Recommended citation: Ian Lansdowne, Zachary Bucknor-Smartt, Oscar Dominguez, Jonathon Foltyn, Micah Guttman, Shreyas Kannanganat, Jevine Kong, et al. 2024. “TURTLE Quadruped Project (QUAD).” Presented at the Texas Regional Robotics Symposium (TEROS), College Station, Texas, USA. https://teros-texas.github.io/2024/.
Download Poster | Download Bibtex
Published in IEEE International Conference on Robotics and Automation (ICRA), 2025
Recommended citation: Eddie Hilburn, Adam Pettinger, Emily Wilkinson, Ian Lansdowne, Robert Ambrose, "Robotic Space Simulator: Controls Implementation for Auxiliary Axes and Zero-G Dynamics." In the proceedings of 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025.
Download Paper | Download Bibtex