
MEEN-408 Soft Gripper
 |  |  |  |
|---|---|---|---|
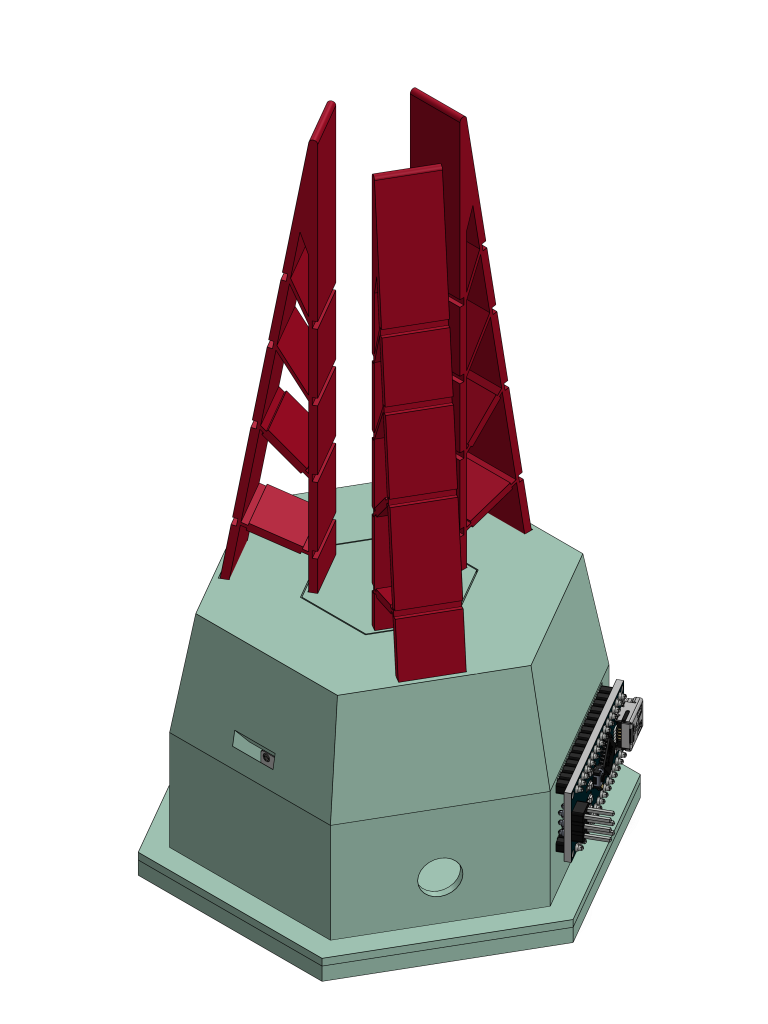
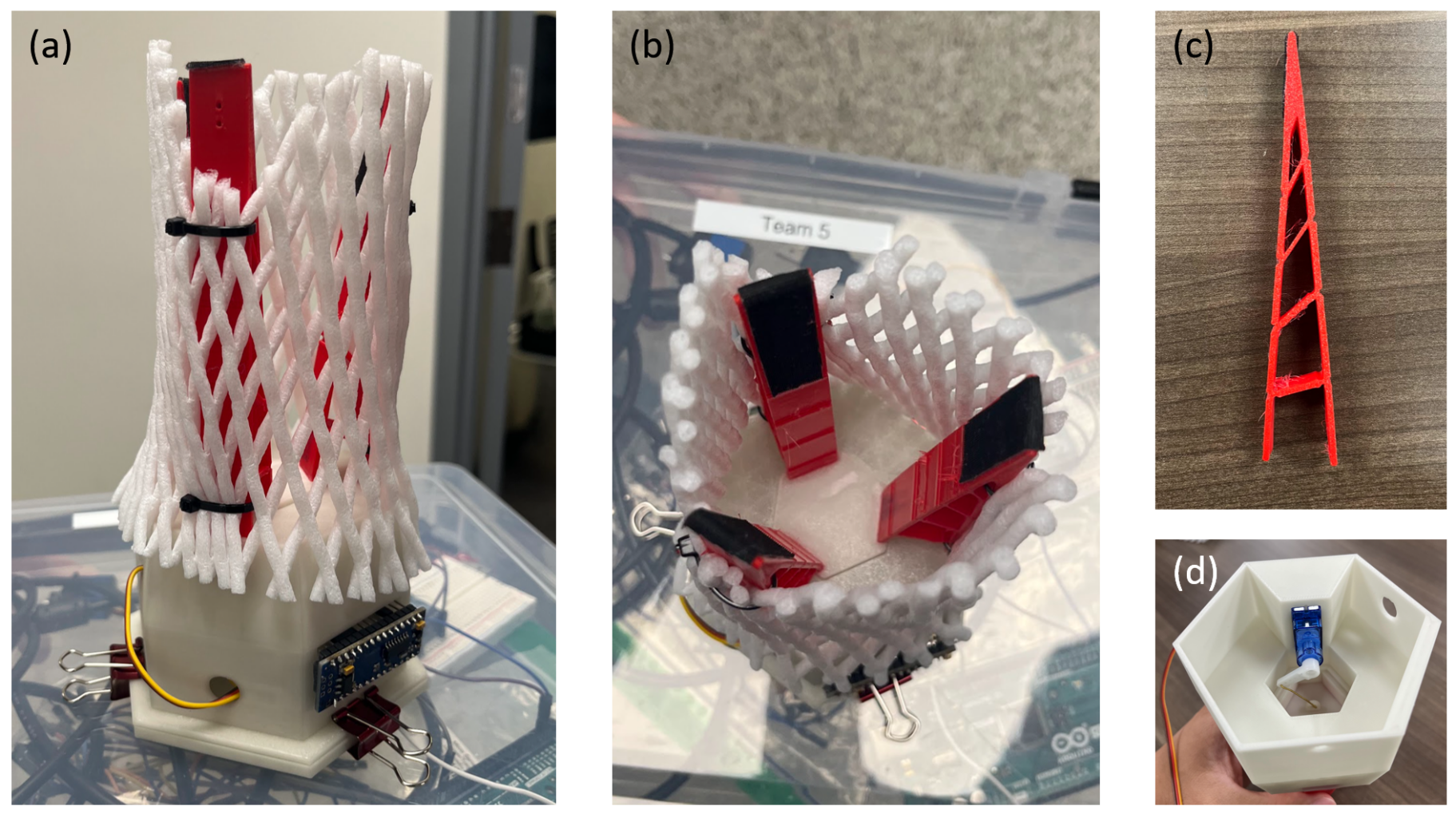
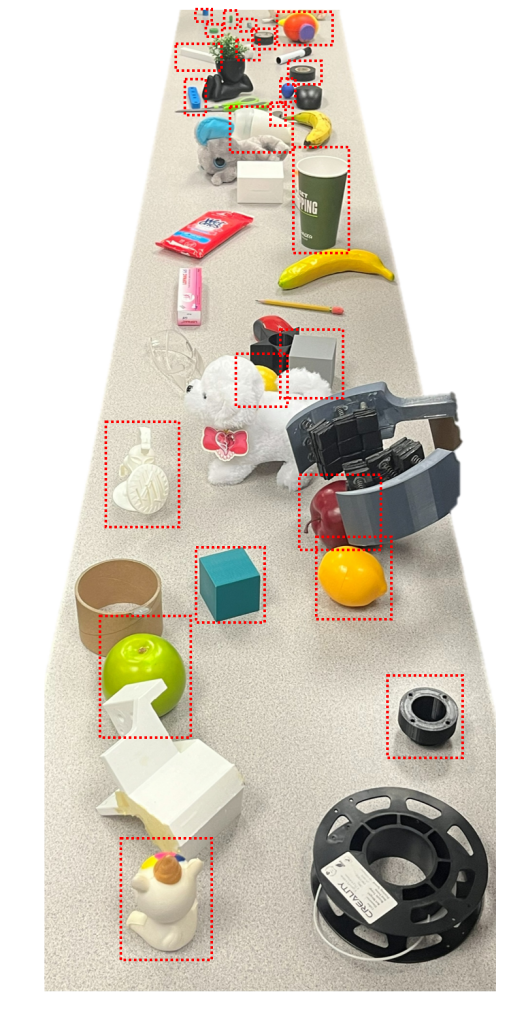
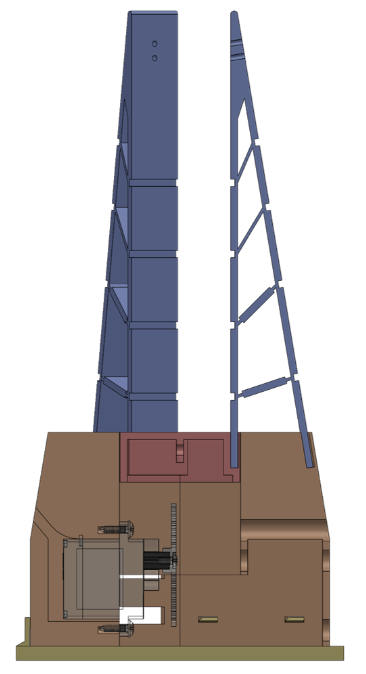
| 3D Model | Views of the Gripper: a. Side View with Mesh b. Top View inside Mesh c. Fin Ray Style Finger d. Bottom View of Servo and Linkage | Tested Household Objects, Success Outlined in Red | Side Cross-Section View of Servo and Linear Slider |
Final Report: Final Report
Course Instructor: Dr. Kiju Lee
This soft gripper was developed for MEEN-408 Mechanics of Robotic Manipulators to grasp a large variety of household objects using a UR3e robotic arm. For simplicity, the design is limited to a single degree of freedom: a slider actuated by a servo to close the gripper. My contribution was the gripper design, which uses the fin ray effect to concentrate force on the grasped object and conform the gripper fingers to its surface. I designed the linear actuator to apply tension at the bottom of the inner finger, bending it to grasp the object.
I 3D-printed the bottom shell and slider from hard PLA plastic and the fin ray fingers from flexible 95A TPU. To increase the coefficient of friction at the fingertips, I applied 3M GM641 grip tape. The mesh, made from the protective EPE foam for a papaya, encapsulates objects within the gripper and has proved effective when grasping multiple objects at once.
The design successfully grasped 23/43 objects and was the third most effective of 8 teams. It met the design requirements to interface with a ZigBee radio module, attach to the UR3e, and grasp at least 5 household objects.