
RAD Lab Robotic Space Simulator (RSS)
 |  |
|---|---|
| RSS Docking Arm with Satellite | UR20 Mouted on RSS |
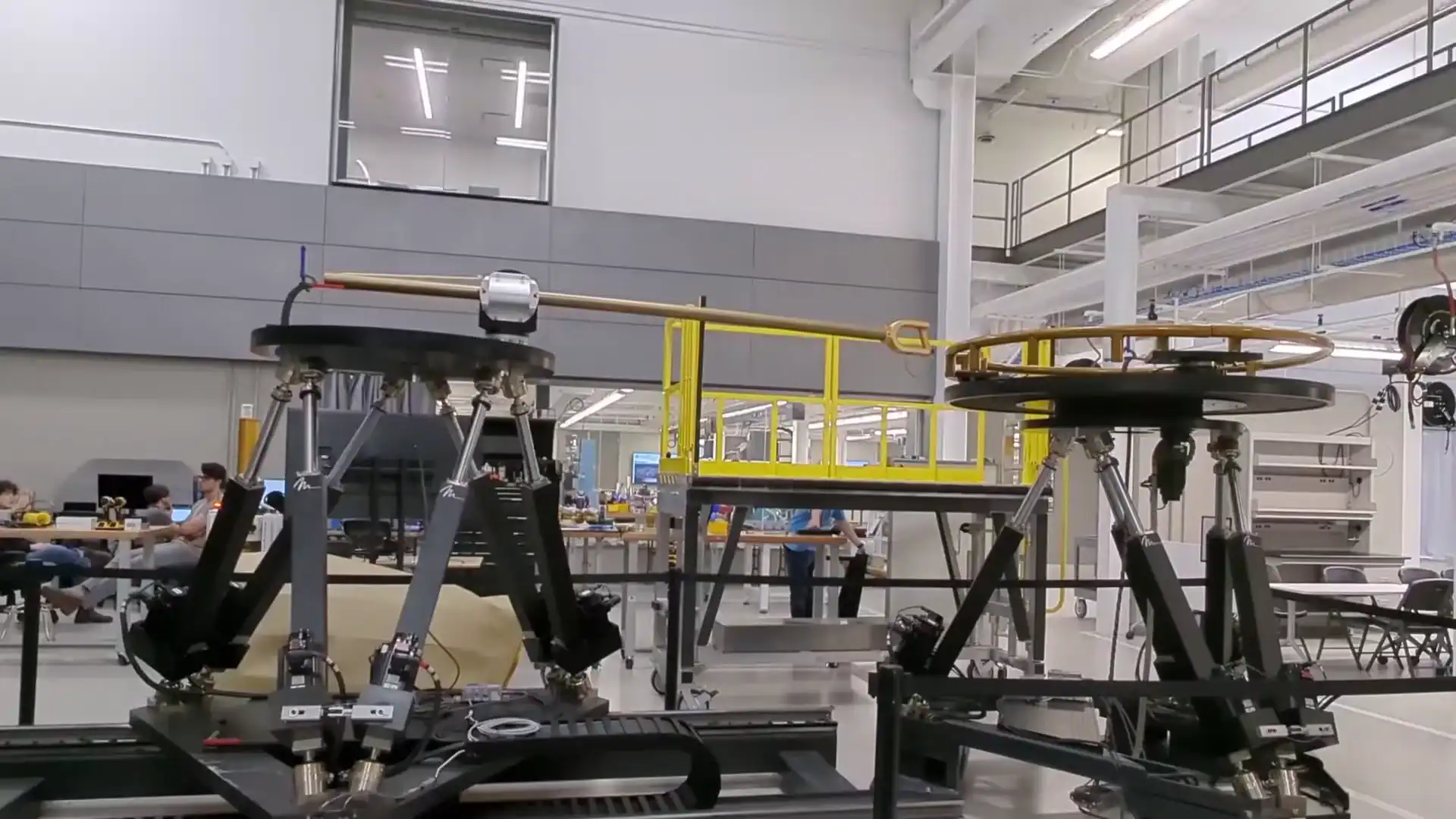
RAD Lab Faculty Sponsor: Dr. Robert Ambrose
The Robotic Space Simulator is a pair of Stewart platforms, each equipped with a slide or rotary auxiliary axis, used to physically simulate the dynamics of spacecraft satellites. Satellites (the arm and rungs above) are mounted to the platform on 6 DoF force-torque sensors. My contribution to this project is the compensation of the mass effects of the satellites on the force-torque sensors to isolate contact forces, and methods to find the mass properties. I co-authored a paper on these methods published to ICRA 20251. Working on the RSS, I was introduced to Lie algebra and applications in robotics. I spent time developing my skills programming C++ modules for ROS, containerizing the simulator code with Docker, and learning to use SolidWorks to create a stand-in robotic arm for safer contact simulation (pictured).